Drone Nedir Nasıl Yapılır?
Merhaba, Drone (Quadcopter) yapmaya mı karar verdiniz ? Bunun için doğru adrestesiniz, elimden geldiğince uygulamalı ve teknik bir şekilde anlatmaya çalışacağım. Son zamanlarda oldukça popüler bir konu haline gelen drone’lar, çoğumuzun ilgisini çekmekte, Günümüzde artık sağda solda birden fazla pervanesi olan çok rotorlu drone’ları (multicopterleri) uçarken görmüşüzdür ?Şimdi Yukarıda resmi olan, aşağıda el yapımı bir Quadcopterin yapım aşamalarını inceleyecek Birazda teknik bir şekilde uzun bir yazı olarak sizi bilgilendirerek nasıl yapılır hakkında fikir sahibi olmaya çalışacağız.
Bu Yazımda Neler Bulacaksınız ?
- Drone (Multicopter) Nedir ?
- Frame (Şase-Gövde)
- Uçuş Kontrolcüleri (Otopilotlar)
- Brushless (Fırçasız) Motor
- ESC ( Elektronik Hız Kontrolcüsü)
- Propeller (Pervane)
- Batarya (Lipo Pil)
- RC Kumanda
BAŞLAMADAN ÖNCE UÇUŞ VİDEOSUNU İZLEYEBİLİRSİNİZ ?
Drone (Multicopter) Nedir ?

Birden fazla pervanesi olan yüksek uçuş kabiliyetine sahip, hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen hava aracıdır. Drone kelimesinin Anlamı ise İngilizce’de erkek arı manasına gelen bir kelime. Fakat günümüzde insansız hava araçları anlamında kullanılıyor. Yerden kumanda edilen yada kullanılan otopilota bağlı olarak otonom yani belli bir uçuş planı üzerinden otomatik hareket eden, uçuş için içerisinde eğer otonom ise bir pilota ihtiyaç duymadan uçabilen hava aracıdır.
Başlıca Kullanım alanları Günümüzde özellikle savunma alanında, Askeri araştırmalarda ve istihbarat keşiflerinde, Uzaktan algılama, jeofizik araştırmaları, güvenlik, taşıma ve yangın söndürme, Hava fotoğrafçılığı, Sinema ve haritacılık, Alanlarında Aktif olarak Kullanılıyor. Multikopter’ler onları yapılma amacına göre 2-3-4-6-8 veya daha fazla pervane (rotor) sayısına kullanım amacına göre sahiplerdir. Dikey iniş kalkış yapabilme, havada asılı kalması, Uçuş moduna uygun akrobatik şekilde süratle hareket etmesi ve stabil bir şekilde uçma yeteneğine sahiptirler. Seçeceğiniz sistem kullanacağınız malzemeler ile kombinasyonlarına uygun bir insanı kaldıracak kadar güçlü veya saatlerce uçabilecek kadar verimli sistemler vede 20 gramı geçmeyecek avuç içinden küçük sistemlerde yapabilirsiniz.
Bicopter, Trikopter, Quadcopter, Hexakopter, Octokopter gibi isimlerle anılan birden fazla motora sahip döner kanatlı hava araçlarına multikopter sistemleri denir. Drone (Multikopterler) pervane (rotor) sayılarına göre isimlendirilmektedir;
- Bicopter 2 pervaneli
- Tricopter 3 pervaneli
- Quadcopter 4 pervaneli
- Hexacopter 6 pervaneli
- Octocopter 8 pervaneli
İlk multikopterimizin bir eğitim modeli ve amatör olacağından Quadcopter yapacağız ve aşama aşama anlatıcam. Quadcopterler basit olarak anlatırsak 4 pervanesinin aynı anda ve devirde dönmesi ile oluşan itiş gücü ile havalanırlar. yani tüm pervaneler üzerinde oluşacak aerodinamik taşıma kuvveti ve sürükleme aynı olacaktır. Böylece dikine hareket gerçekleştirip havaya Kalkmış olacaktır.
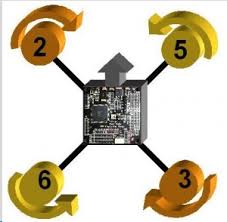 Helikopterlerde’ki kuyruk rotorunun engellemiş olduğu, helikopterin kendi ekseni etrafında dönme tanımı dönüş hareketi multicopterlerde motorların farklı yönlerde dönmesi ile bertaraf edilir. Yani merkezkaç kuvveti sıfırlanır. Yandaki resimde olduğu gibi Örneğin Quad için motorların ikisi saat yönünde , diğer ikisi ise saat yönünün tersine dönerek, multicopterlerin kendi ekseni etrafında kontrolsüz dönmesini engeller.
Helikopterlerde’ki kuyruk rotorunun engellemiş olduğu, helikopterin kendi ekseni etrafında dönme tanımı dönüş hareketi multicopterlerde motorların farklı yönlerde dönmesi ile bertaraf edilir. Yani merkezkaç kuvveti sıfırlanır. Yandaki resimde olduğu gibi Örneğin Quad için motorların ikisi saat yönünde , diğer ikisi ise saat yönünün tersine dönerek, multicopterlerin kendi ekseni etrafında kontrolsüz dönmesini engeller.
Quadcopterin İleri doğru gitmesi için arkasında bulunan 2 motor öndekilere göre daha hızlı dönerek arka tarafta daha fazla itki üretirler ve quadcopter ileri hareketini gerçekleştirmiş çok yönlü ve güçlü itki olur. Çok yönlü ve güçlü Geri hareket içinse tam tersi öndeki 2 motor arkadaki 2 motora göre daha hızlı dönerek arkaya doğru hareketini gerçekleştirir. Sağa gitmek için aynı şekilde soldaki pervanenin hızı arttırılır ve aynı durum sola doğru hareket etmek içinde geçerlidir. Bu şekilde Pitch ve Roll olan 2 eksende hareket etmiş olur. Son hareketimiz ise Yaw ekseni olan kendi ekseni etrafındaki dönüşü olarak tanımlanabilir. Dönülmek istenen yönde dönen pervanelerin hızı arttırılır ve ters yöndeki pervanelerin hızları düşürür bu sayede kendi ekseninde dönüş hareketi yapar. Bahsettiğim tüm bu hareketler uçuş kontrolcüsü tarafından kullanıcıdan (RC Kumanda) ve sensörlerden (IMU) aldığı verileri kullanarak gerçekleştirir. Biz Quadcopter yapacağımız için Quadcopter üzerinden anlatıyorum.
İnsansız hava üretiminde yapılan modellerin dizaynlar kullanım alanlarına göre farklılık göstermektedir. Örnek vermiş olursak havadan çekim yapacaksınız DSLR kamera ile, Yük taşıyacak bir multicoptere ihtiyacınız var, bu kombinasyonda itiş gücü yüksek motorlar kullanmanız gerekir. Ama ne kadar çok pervaneniz olursa çok yük kaldırır gibi cümleler duymaya başlamış gibiyim, Tabi ki çok rotor daha ağır şeyler kaldırır ama bununla birlikte gelen sorunlarda var en başta maliyet artıyor ve uçuş süreniz kısalıyor gibi bir çok etken var, tam tersini düşünürsek uzun süre uçmasını istediğini bir multicopterde de oldukça verimli motorlara, hafif tasarlanmış gövdeye ihtiyaç duyacaktır. Zamanla Kullandığınız malzemeler size yeterli gelmeyebilir ve kendi amaçlarınıza uygun multicopterleri yaparken orijinal ürünleri modernize ederek yüksek verim alabilirsiniz. Bu motorları üreten firmaların milyonlarca dolarlık yatırım çalışmaları sonucu yapamıyor biz nasıl yapacağız ? ? gibi sorular aklınızda olabilir. sorunun cevabı basit ? motorların üretilirken tamamen kullanım amacına göre üretilir, Verdikleri bilgi grafiğindeki değerlere ulaşması için. Tabi ki grafikteki bazı değerlere ihtiyacımız yoksa motoru modernize ederek örneğin sargı sayısını değiştirerek istediğiniz verimi alabilirsiniz. Bu olay bütün parçalar için geçerlidir ESC elektrik hız kontrol ünitesinin yazılımını değiştirerek örneğin motorunuzun daha hızlı tepki vermesini sağlayabilirsiniz.
Frame (Şase-Gövde)

Multicopterimizin tüm sistemlerini yerleştirip muhafaza edeceğimiz multicopterimizi oluşturan Bölümüne Frame (Şase-Gövde) olarak isimlendiriyoruz.
Multicopterimizin Görüntüsünü tam anlamıyla oluşturan kısıma geldik ? Hazır satılan frameler var, ama ben resimden anlaşılacağı gibi kendi 3D printerdan imal ettiğim frameyi anlatacağım. Hafif olması için Bunlar Karbon fiber, alüminyum, Plastik gibi birçok farklı malzeme kullanılarak üretilebilir. Öncelikle kullanım amacınıza göre seçim yapmalısınız ki boyutunu, formunu amacınıza göre parametrelere uygun bir gövde tasarlayarak veya satın alarak uygun seçim yapmaktır, bunlar hava çekimi, sadece uçmak, adapte edilmiş farklı bir proje olmak üzere farklılık gösterebilir. Sizde kendi ihtiyacınıza yönelik bir frame tasarlayabilirsiniz aynı benim yaptığım gibi ama inanın daha maliyetli olacaktır ? Multicopter framesinde dikkat edilmesi gereken konular ise amatör ve yeni başlıyorsanız alışa gelmiş tasarımların dışına çıkmamaktır. Fazla uğraşmak istemiyorsanız özellikle yazılım konusunda, standart bir konfigürasyon frame seçin ve amacınıza yönelik olması şartı ile.
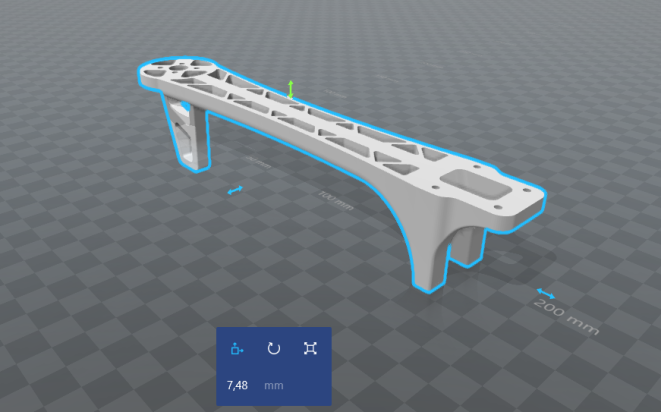 Ben DJI firmasının satmış olduğu f450 frame modelinden kopya çekerek kendi 3D kollarımı tasarladım. Toplam ağırlık 160gr uzunluk ise 21cm Kol uzunluğu ile gövde toplam ile motordan motora olan uzaklık 500mm sınıfında framemi tasarladım.
Ben DJI firmasının satmış olduğu f450 frame modelinden kopya çekerek kendi 3D kollarımı tasarladım. Toplam ağırlık 160gr uzunluk ise 21cm Kol uzunluğu ile gövde toplam ile motordan motora olan uzaklık 500mm sınıfında framemi tasarladım.




İlk işim 3D baskı almaktı, Bana Yardımcı olan 3DRobotikLab’ın Ceo’ Mustafa Abime Teşekkür ederim. Baskı Kalitesi ve hizmeti mükemmel, sizde kendi baskılarınızı almak istiyorsanız aşşağıda 3D Tenkoloji Facebook sayfasından tıklayarak ulaşabilirsiniz.
⇒ 3D Teknoloji Baskı Hizmeti ⇐
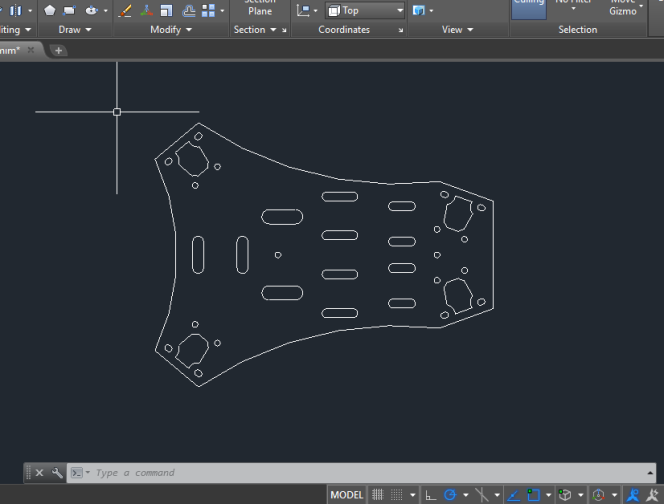
Kolları montajlayacağım gövde tasarımım bu şekilde oldu. Ön tarafdaki kolların açısı 120 derece açıklığa sahip kamera ve gimbal taktığımda pervaneler yada kollar görüntüye girmemesi için kendimce çözüm geliştirdim. Gövde kısmını printer’dan basmak bana pek iyi bir fikir gelmedi mukavemeti pek sağlam olmayacağını düşündüm ve elimde bolca bulunan Baskı devrede kartlarımı basmak için kullandığım Bakır Plaketten yaptım.




2 adet alt tarafa ve üst tarafa aynı şekilden dremmel ile kesip kol montaj civata deliklerini matkap ile açtım. Multicopterde 3 farklı band frekans vardı telemetri, FPV verici ve kuamanda alıcı frekansı bunları ekranlama yapmamısı için kestiğim plaketteki bakır yüzeyi asit ile çözelttim. Ve son Olarak sprey boya ile siyah rengine boyadım.




Kolları yavaş yavaş gövdesine vidaladım ve kollara Motorları ve ESC’leri montajladım.




Son kısımda Bütün malzemeleri yerleştirdim sırası ile, ESC’lerin paralel olarak beslemesini yapıp LİPO pile konnektör çıkartarak ve kabloları kenardan geçirerek kablo karmaşasından kurtuldum. Multiwii’yi alt tarafını vibrasyon emecek bir yumuşak malzemeyle gövdeye simetrik bir şekilde belirtilen yöne göre montajını yapıp alıcı ile gerekli kabloları takarak alıcı ile otopilotun bağlantısını gerçekleştirdim. Son olarak üst gövdenin vidalamasını yapmadan önce pili üst kısımda tutacak olan cırt cırt bantların yuvasını açarak üst kısmı montajladım ve cırt cırt’lar sayesinde pil ile CG ayarını yaparak multicopterimi ağırlık merkezsini dengeledim. Uçuş ağırlığım 1100gr tutarak beni mutlu etti ? Burada Uygulamalı bir anlatım yapmaya çalıştım. Umarım sıkmadan size bilgilerimi doğru bir şekilde paylaşmayı becerebiliyorumdur ? Unutmayalım bilgi paylaştıkça çoğalır.
Uçuş Kontrolcüleri (Otopilotlar)
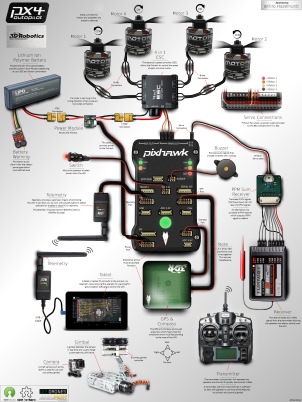
Şimdi geldik en önemli parçaya, Kısaca beyni diyebiliriz ? Yandaki resimde pixhawk marka otopilot ile yapılmış bağlantı şeması görmekteyiz. Multicopterimizin uçmasını sağlayan hiç şüphe yok ki en büyük payı olan uçuş kontrolcüsüne. Kumanda alıcısından aldığı verileri sensörleri ile birlikte içindeki yazılım sayesinde işleyerek motorları ESC ile kontrol etmektedir. Peki nasıl yapar ? İlk Başlarda birkaç kişi tarafından geliştirilen ve yapılan kontrolcüler zaman ilerledikçe teknolojinin gelişmesiyle büyük firmalar tarafından yapılmaya başlanmıştır. Çok rotorlu araçlarda kontrol işlemi uçaklarda olan sistemlerden daha karmaşık ve zordur. İlk versiyonlarında gyro sensörü ve alıcıdan aldığı bilgileri içinde bulunan yazılımı bir mikrodenetleyici yardımı ile motorlara ileterek dengede durarak stabil uçmasını sağlamaktı, En önemlisi hangi amaçla kullanılacağına göre kontrol kartını seçmek gerekir. Bu sebepten kullanılan kontrol kartlarının özellikleri iyi analiz edilerek alınmalıdır. Günümüzde ise kontrolcüler en az 3-4 sensör yani GPS, accelerometre, magnometre, barometre, gyro, ultrasonic ve kinetik gibi sensörler ile desteklenmiş tam bir oto-pilot (otonom) haline getirilmiş olup bu tür kontrolcüleri kullanarak daha güvenli ve sağlıklı uçuşlar yapmamızı sağlıyor.
Biz yanda Görmüş Olduğunuz Arduino tabanlı açık kaynak olan Multiwii se adlı kontrolcüyü kullandığımız için onun üzerinden anlatıcağım. isterseniz sizde Arduino ve gyro sensör Kullanarak kendi kontrolcünüzü yapabilirsiniz onu ise başka bir yazıda anlatıcağım. Biraz uzun yazı oldu kusura bakmayın elimden geldiğince bilgi vermek istiyorum uygulamaya az kaldı ?
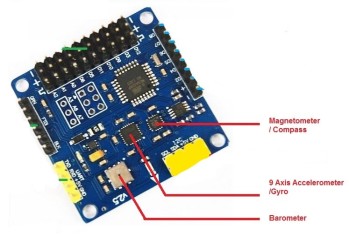
Yukarıda Bahsettiğim ve diğer kontrol kartlarında olan sensörleri basit olarak inceleyelim;
Gyro, accelerometre sensörü çok hassas bir ivme sensörüdür. Kendi kendini dengelemesini bu sensör sayesinde gerçekleştirir. Siz kumandaya müdahale etmediğinizde multicopteriniz otomatik olarak kendisini yere paralelleyecektir ve dış etkenlerden (rüzgar, dengesiz yük vs.) nedeniyle multicopterimizin dengesi bozulunca devamlı surette yere olan paralelliğini bozmasına izin vermeyecektir.
GPS Alıcısı ile Multicopterimiz küresel konumlama sistemi (Global Positioning System) ile dünya üzerindeki uydulara bağlanarak enlem ve boylam bilgilerini alarak dünya üzerinde yerini bilmektedir. İstenilen kordinatlara görev uçuşu ile adlandırılan (Waypoint) yerlerine uçması sağlanabilir. Bulunduğu noktadan ilk kalkış yaptığı yere (return to home) geri dönmesi sağlanabilir. Kumandanız ile kontrol etmeyi bıraktığınızda dış etkenler (rüzgar) ile multikopterin havada yerinin (positions hold) değişmesini engellemek ve asılı kalmasını sağlamak içinde kullanılan sensördür. Ayrıca Gps ile bilmemiz gereken hasas bir sensör olduğu ve titreşim, manyetik ve akım kablolarının dışında oluşan sinüsoidal dalgalardan kolayca etkilenebilir olması, Dolayısı ile GPS sensörü güç kablolarından uzak bir yere montaj yapılmalıdır.
Magnometre sensörü dünyanın manyetik alanını okuyabilen ve yön bilgisi olan bir sensördür. Kısaca pusula denilebilir. Manyetik kuzey noktasını referans nokta olarak kullanır. Bu sensörün takılacağı yere dikkat edilmelidir. Çünkü multicopterin yönü bu sensöre bağlıdır. Önemli olan bu sensörün kalibrasyonu doğru bir yerde altından ve üstünden elektrik dağıtım kablosu enerji direkleri olmayan varsa boş bir arazide ve üzerinizde yada yakınında metal eşya olmayacak şekilde yapılmalıdır. Aksi taktirde sorun yaşayabilirsiniz. Ek manyetik kuzey noktası olarak onu ülkede yıllara göre değişiklik gösterdiği için yazılım kısmında bu sensörle ilgili bölümde değişiklik yapabilirsiniz.
Barometre adından’da anlaşılacağı gibi basınç sensörüdür. Barometre sensörü hava basıncını ölçerek yükseklik bilgisi elde eder ve bu şekilde hava aracının istenilen yükseklikte otomatik olarak sabitlenmesi için kullanılır.
Brushless (Fırçasız) Motor

Fırçasız motorlar adından da anlaşılacağı gibi fırça sistemi yoktur. Bunların, fırçalı motorlardan farkı akım çeviricilerin fırça değil elektronik üzerinde. Daha sessiz çalışmaları, fırçaların meydana getirdiği sürükleme’nin ve ısıdan kaynaklanan kayıpların, fırçaların meydana getirdiği kıvılcımların olmaması, kolay soğutulabilmeleri ve en önemlisi yüksek verimliliğe sahip diğer motorlara göre bakım gerektirmeyen fırçasız motor üstünlükleridir. Fırçasız motorlar kendi ailelerinde birkaç çeşide ayrılırlar.
Fırçasız motorlar inrunner ve outrunner olarak iki türde motorlardır. İnrunner denilen motorlar, klasik rotoru motorun merkezinde olan sabit sargıları dış kısımda olan motorlardır. Yani motorun dış çeperi sabitken iç kısmı hareket eder. Outrunner olan yani bizim kullanacağımız motor türünde ise motor sargıları motorun merkezinde sabitken, rotor üzerinde mıknatısları da barındıracak şekilde motorun dış çeperi, dış kısmıdır. Yani motorun dış kısmı mıknatıslı olan hareket ederken iç kısmı sabittir. Genellikle multicopter sistemlerinde kullanılan fırçasızc (Brushless) motorlar kullanılır. Brushless motorlar yapısı sayesinde çok yüksek devirlere çıkabilirler ve yüksek tork üretebiliyor olmasıdır bu avantaj olup herhangi bir dişli sistemi kullanmadan doğrudan pervaneye motorun rotoruna bağlanabilir.
Benim gibi bir Quadcopter yapmak istiyorsanız motorun yapımcısı yada fabrikasının test ettiği aşağıdaki resimde bulunan datasheet tablosunu çok iyi analiz etmeniz gerekiyor. Örnek vermiş olursak Seçim için ne kadar hangi pervane ile yük (thrust) taşıyacağını, kaç hücreli pil ile yani çalışabileceği voltajı, Motoru sürmek için kullanılacak ESC ve son olarak ilk göze çarpan ve dikkat edeceğiniz değer KV olarak iyi analiz etmek gerekir.
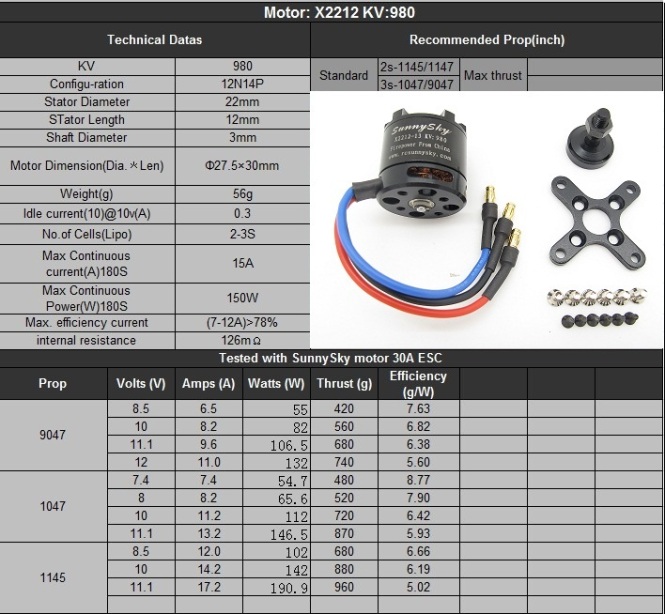
KV değeri Brushless motorlar için motora verilecek olan 1V başına devri sayısını (rpm) ifade eder. Peki nasıl bizim kullanacağımız motoru inceleyelim. Kullandığımız motorun Kv değeri 980 KV bu motor 1 volt ile 980 dakikada 980 tur atmaktadır. Yani biz 3 hücreli (12V) pil kullancağımız için 12×980=11.760 (rpm) devir/dakika’=dır. Genellikle devir/dakika yerine rpm kullanılır. Datasheet tablosunda diğer önemli unsur ise çalışabileceği voltaj aralığıdır. Bu motor için üretici 2-3 s hücre (8.4V∼12.4V) aralığını tavsiye ediyor. Tabloda belirtilen motorun en fazla 190 watt güç harcayabilir ve 17 amper akım çekebilir. Buradan anlaşılacağı 2-3 s 30 amperlik bir ESC Gönül rahatlığı ile kullanabiliriz. Şimdi geldik asıl önem arz eden konuya, yukarıdaki tabloda üretici firmanın bazı pervaneler ile tek motorun kaldırabileceği gr cinsinden ağırlık (thrust) testler bulunuyor. Burada multicopterimizin uçuşa hazır ağırlığını tahmini ederek bazı seçimler yapacağız.
Biz 4 motorlu olan bir Quadcopter yapacağız ve tahmini uçuş ağırlığımız 2 Kg olarak tahmin ediyoruz.
2/4= 500gr olarak motor başına düşen ağırlık.
Sağlıklı ve uzun bir uçuş için motorumuzun sağlaması gereken kaldırma gücü en az 2 katı olmalı, yani motor başına düşen ağıırlığın 2 katı güç kaldırabiliyor olmalıdır. Burada seçeceğimiz pervane ise 11×45″ boyutunda ve bataryamızda 3s pil olmalı. Seçtiğimiz pervane ile 960gr (thrust) kaldrıma gücü elde ediyoruz.
Uzun süreli uçuşlar yapmak istiyorsanız motorun bilgi tablosunda verim (efficiency) yazan kısıma bakabilirsiniz. Oradaki değer ne kadar yükseliyorsa verim (efficiency) o kadar yükselecektir. Motorlar hakkında bir diğer dikkat edilmesi gerekenler ise balans problemidir, çok ciddi titreşimlere sebep olabilir ve bu bütün sistemi ve otopilotun bazı sensörlerini özellikle etkileyebilir.
ESC ( Elektronik Hız Kontrolcüsü)
 Quadcopterdeki motorumuzun pervane ile hareket etmesi için ESC’ye ihtiyacımız vardır. ESC İngilizcede Elelectronic Speed Controller kelimelerinin baş harflerinin kısaltmasıdır. Türkçesi ise elektronik hız kontrolcüsü olarak bilinir. Görevi ise kontrolcüden veya alıcıdan aldığı komutlarla motorun hızını kontrol etmektir.
Quadcopterdeki motorumuzun pervane ile hareket etmesi için ESC’ye ihtiyacımız vardır. ESC İngilizcede Elelectronic Speed Controller kelimelerinin baş harflerinin kısaltmasıdır. Türkçesi ise elektronik hız kontrolcüsü olarak bilinir. Görevi ise kontrolcüden veya alıcıdan aldığı komutlarla motorun hızını kontrol etmektir.
Peki nasıl yapar, Bildiğimiz üzere fırçasız motorlar 3 fazlı motorlardır. Üzerinde bir mikrodenetleyici entegre bulunur. Pilden aldığı DC gerilimi power mosfetleri sayesinde özel bir Pwm (Pulse Width Modulation) yani darbe genişlik modulasyonu adındaki sinyali pwm şeklinde motora uygular, Böylece motoru sürmüş oluruz.
ESC’leri kullanım amacına göre seçmeliyiz, Boyutları gün geçtikçe gelişen teknoloji ile küçülüyor ve 5×5 cm boyutunda bir kartta 4 adet esc ve daha fazlasını içinde barındıran modellerde var. ESC Çalışabileceği maksimum akım ve voltaj değerleri ile isimlendirilir ve kullanılırlar. Voltaj değerleri voltajı yazarak değil Lipo pil hücre (S) sayısına göre üzerlerinde yazar;
1s = 3.7 volt 2s = 7.4 volt
3s = 11.1 volt 4s = 14.8 volt
5s = 18.5 volt 6s = 22.2 vot
Bu sebepten kullanılacak ESC ile lipo pil arasında uyum olması gerekir. Örnek olarak Bizim Kullandığımız ESC olan 2-4S 30A İnceleyelim;
Kullandığımız ESC 7.4V (2S) ile 14.8V (4S) Volaj aralığında ve 30 amper yüke kadar çalışabileceğiniz gösteriyor. ESC seçmek için Motorumuzun firması tarafından verilen datasheets tablosunu inceleyerek kullandığımız pervane ve voltaj değeri ile test edilen motorumuzun maksimum çektiği akıma bakılarak seçebilirsiniz genelde maksimum akımdan %10 fazla değeri yüksek ESC kullanılması ESC’nin ısınması ve sağlıklı bir uçuş için güven arz eder, bu arada Drone kazalarını %60 oranında ESC yüzünden kazaya sebebiyet veriyormuş.
ESC’lerin girişinde 2 adet Besleme, çıkışında ise 3 motor bağlantı kablosu ve 1 tanede 3’lü sinyal kablosu vardır. Girişte bulunan 2 kablo, kırmızı (+) ve siyah (-) kablo olmak üzere pile bağlanır, 4 adet ESC varsa hepsini paralel renklerine birleştirerek Lipo pile bağlanır. Çıkıştaki 3 adet kablo motorlara bağlanır ve motorun yönü bu kablolar ile herhangi ikisinin yerinin değiştirilmesiyle motor yönü değiştirilebilir. 1 adet 3’lü sinyal kablosunda ise standart olarak sarı veya beyaz renkte olan sinyali, siyah olan şaseyi ve kırmızıda +5V beslemeyi temsil eder. Bazı ESC’lerde +5v olan besleme kısmı yani Ubec (Regülatör) yoktur, direk olarak sinyal kablosu ve şase kabloları vardır bu ESC’ler ise OPTO olarak isimlendirilirler.
Propeller (Pervaneler)

Dönme etkisiyle taşıma kuvvetini üreten taşıyıcı yüzeylere başka bir deyişle döner kanatlara pervane denir. Dönme etkisiyle taşıma kuvvetini üreten taşıyıcı yüzeylere başka bir deyişle döner kanatlara pervane denir.
Multikopterlerde 2 tip pervane kullanılır;
- Saat yönü dönen (ClockWise)
- Saat yönü tersi dönen (Counter ClockWise)
2 farklı dönüş yönüne sahip pervane kullanılmasının sebebi quadcopter’in gövde üzerinde oluşturmuş olduğu anti tork etkisini yok etmektir.
Multikopter sistemlerin etki yapısını oluşturan motorlar önerilen çapta ve yapıda pervaneler ile kullanılmalıdır. Yani Motoru yapan firma tarafından verilen datasheets tablosunda testleri yapılmış pervane boyutlar ile uçuş ağırlığınız , pil voltajınız gibi parametreleri baz alarak seçilmelidir. Motorları önerilen pervane seçimi ile birlikte kullanmak verimi yükseltmektedir. Tavsiye edilen ölçüler kullanılmaz ise aksi takdirde motorunuzun ömrü kısalabilir ?
Pervaneler, boy ve hatve açılarına göre isimlendirilirler. Örneğin 10×47 pervane demek 10 inch boyunda 4.7 inch hatvesine sahip bir pervane demektir. Hatve açısı, pervanenin 360 derecelik dönüşünde ilerlediği mesafe değeridir. Bu değerler bazen mm cinsinden de verilmektedir. Fakat belirtilmediği durumlarda inch olarak kabul edilir. Pervanelerde hatve açısına göre bazı özellikler elde edilir, yüksek hatveli pervaneler yavaş süratlenip hızlı uçuş sağlarlar, hatve açısı küçük olan pervaneler ise çabuk hızlanırlar, yavaş uçuş karakteristiği gösterirler. Birçok malzemeden üretilmiş pervaneler var amatör ve yeni başlıyor plastik pervane kullanmanız ilk denemlerde kırımı fazla olabileceğinden hem bütçe hem de güvenlik sebebi ile önerilir. Önemli olarak Lütfen İlk denemelerde Pervaneleri takmayın !İleriki zamanlarda hava çekimi ve kalite ihtiyacı duyduğunuzda ahşap veya karbon fiber pervane kullanabilirsiniz biraz maliyetli artabilir.
Pervanelerde balans oldukça önemli bir konudur. Balans edilmemiş bir pervane aşırı derecede titreşime, gürültüye motorların rulman ömürlerini kısaltma ve en önemlisi otopilotta bulunan gyro sensörlerini şaşırtabilir nedeni ise kullanılan motorlar ortalama 3000-12000 rpm arasındaki devirlerde döner. Bu sebepten yeni alınmış dahi olsa pervaneler kullanılmadan önce balans testi yapılmalıdır.Peki nasıl yapılır;
 Yanda görülen pervane balans aparatıdır. Ağır olan kısım bir tarafa yatar yani ağır olan kısım burada 1gr fark olsa bile yüksek titreşimler oluşabilir, balansını almanın birkaç seçenekleri vardır, ağır gelen kısmın altına zımpara yapılarak eksiltilebilir yada ağır gelen kısmın zıt tarafına bir parça bant yapıştırılarak ağırlıklar eşitlerenek balans alma şlemi tamamlanır.
Yanda görülen pervane balans aparatıdır. Ağır olan kısım bir tarafa yatar yani ağır olan kısım burada 1gr fark olsa bile yüksek titreşimler oluşabilir, balansını almanın birkaç seçenekleri vardır, ağır gelen kısmın altına zımpara yapılarak eksiltilebilir yada ağır gelen kısmın zıt tarafına bir parça bant yapıştırılarak ağırlıklar eşitlerenek balans alma şlemi tamamlanır.
Batarya (Lipo Pil)

Multicopterlerde Yüksek akıma uyumluluğu sebebiyle fırçasız motorlara yüksek akım veren ve yüksek kapasiteye sahip pillere ihtiyaç duymaktadırlar. Li-po (lityum- polimer) piller yüksek akım ve yüksek kapasite ihtiyacını en yüksek verimde karşılayan pillerdir.
Bildiğiniz gibi multicopterlerde en az 4 adet motor bulunmaktadır bir tanesi ortalama kalkış akımı 15 amperi geçebilir ve buna göre lipo pil seçilmelidir. Pilin kapasitesi ve ağırlığı doğru oranda artmaktadır. Pilin voltajı, motorun özelliklerine göre ve istenilen devire göre ayarlanır Kullanılan pervanenin belirlenen voltaja uygun olması gerekir. Genellikle tercih edilen 11.V (3S-3 hücreli) lipolardır. Amperi ise multicopterin taşıyabileceği, güvenli uçabileceği ağırlığı geçmeyecek şekilde seçilmelidir. Pilde dikkat edilmesi gereken değer “C” değeridir. Lipoların üzerinde 15C, 20C, 30Cgibi değerler vardır. C değeri arttıkça maliyeti ve ağırlığıda artar. Bu C değerini pilin amperi ile çarpıldığında liponun anlık olarak verebileceği amper değeri ortaya çıkar. Örneğin 5000mA 20C lipo (5000×20=100.000) 100A akım verir. Motor (4x) maksimum 25A çekiyorsa, ESC 30A ise bu 100A verebilen pil uçuş sırasında ısınmadan yeterli beslemeyi sağlayacaktır. Düşük C değerli lipolar kullanılır ise pil ısınır, yıpranır ve çabuk bozulur. Burada Bilmemiz gerekenler Bu kadar daha fazla Lipo Pillerde bilgi edinmek istiyorsanız Lİ-PO Piller ve Kullanımı Yazımı Mutlaka Okumalısınız.
RC Kumanda

Multicopterimizi uzaktan el ile kontrol etmek için RC kumandalara ihtiyacımız vardır. Model uçaklar ve helikopter kumandaları (Radio Control) aynı kumandalardır.
Multicopter yada uçak modelciliğin de genellikle 2.4 GHz frekans bandında en az 6 kanallı kumanda kullanılır. Bu kumandaların kendilerine göre haberleşme protokolleri bulunmaktadır. Kumandanın içinde kullanılan RF mödüle göre protokoller değişebilir. Bazı kumandalarda ise arkasında değişebilen RF modüller vardır kendi RF modülünüzü takıp kullanabilirsiniz. Kendi modülü ile günümüzün şartlarında ortalama 1Km ve daha fazlası mesafelere gidilebilir standart olmamakla birlikte kullanılan ortama (Baz istasyonu, FM radyo vericileri vs.) göre değişkenlik gösterebilir. FPV yapanlar genelde uzun mesafe için ayrı modül alıp takabiliyor, uzun mesafe için 2.4ghz göre daha düşük olan 433mhz frekans bandını kullanan RF modüller takılabilir. 50km+ gibi ciddi bir şekilde mesafeniz artacaktır. Kendi RC kumandanızı yapabilirsiniz Wifi modüller ve mikrodenetleyici kullanarak ama güvenli ve sağlıklı olmayabilir.
Diğer bir konu olan kullanılan kumandalardaki kanal sayısıdır. Bizim Multicopteri kontrol etmemiz yani uçması için gereken kanal sayısı minimum 4 kanaldır. Ama en az 6 kanallı bir kumanda olması bizim için artı bir durum olacaktır. Diğer 4 kanal kontrol stick’leri geriye kalan 5. ve 6. kanalımıza uçuş modu değiştirmek için kullanabiliriz, yada başka bir örnek olarak hava çekimi yaparken ve kameranın yönünü değiştirmek için de kullanabilirsiniz.
Buraya Kadar Okuduğunuz İçin Teşekkür Ederim, Bilgilerimi Aktarabildiysem Ne Mutlu Bana ! Bir Sonraki Yazımda Görüşmek Üzere ?
Alıntıdır: Canyazblogdan.
Alıntı: canayazblog.wordpress.com